")
")

Contrairement à une simple LED ou des composants de basse consommation,
les moteurs demandent une puissance que le Raspberry Pi ne peux assumer.
Ne vous risquez pas à connecter directement des moteurs, sous peine d'endommager votre Raspberry Pi.
Celui-ci ne pouvant délivrer beaucoup de courant, vous risquez des reboots sauvages.
Afin d'alimenter et de contrôler correctement les moteurs de notre Rover, vous aller réaliser un petit montage.
Celui-ci permettra de séparer la partie puissance de la partie logique.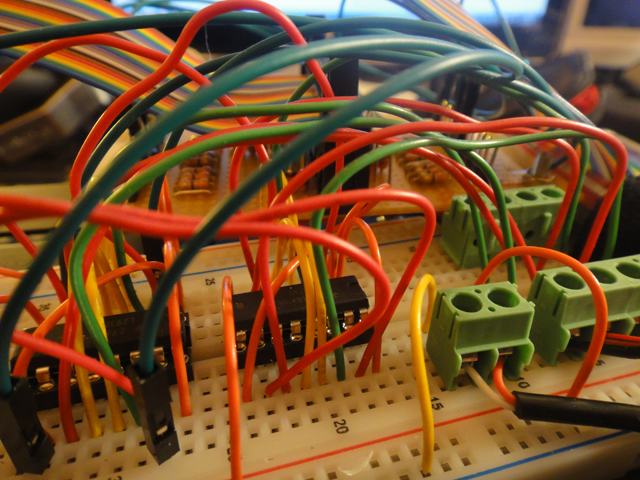
éléments nécessaires
Nous aurions pu utiliser des opto-coupleurs et des ponts en H pour gérer l'ensemble.
Mais par soucis d'économie et de simplification, j'ai choisi d'utiliser le composant L293D.
Il est très populaire dans le domaine de la robotique car il inclut directement tout le nécessaire.
Voici un wiki très bien fait qui explique le fonctionnement de celui-ci : http://mchobby.be/wiki/index.php?title=Pont-H_L293D
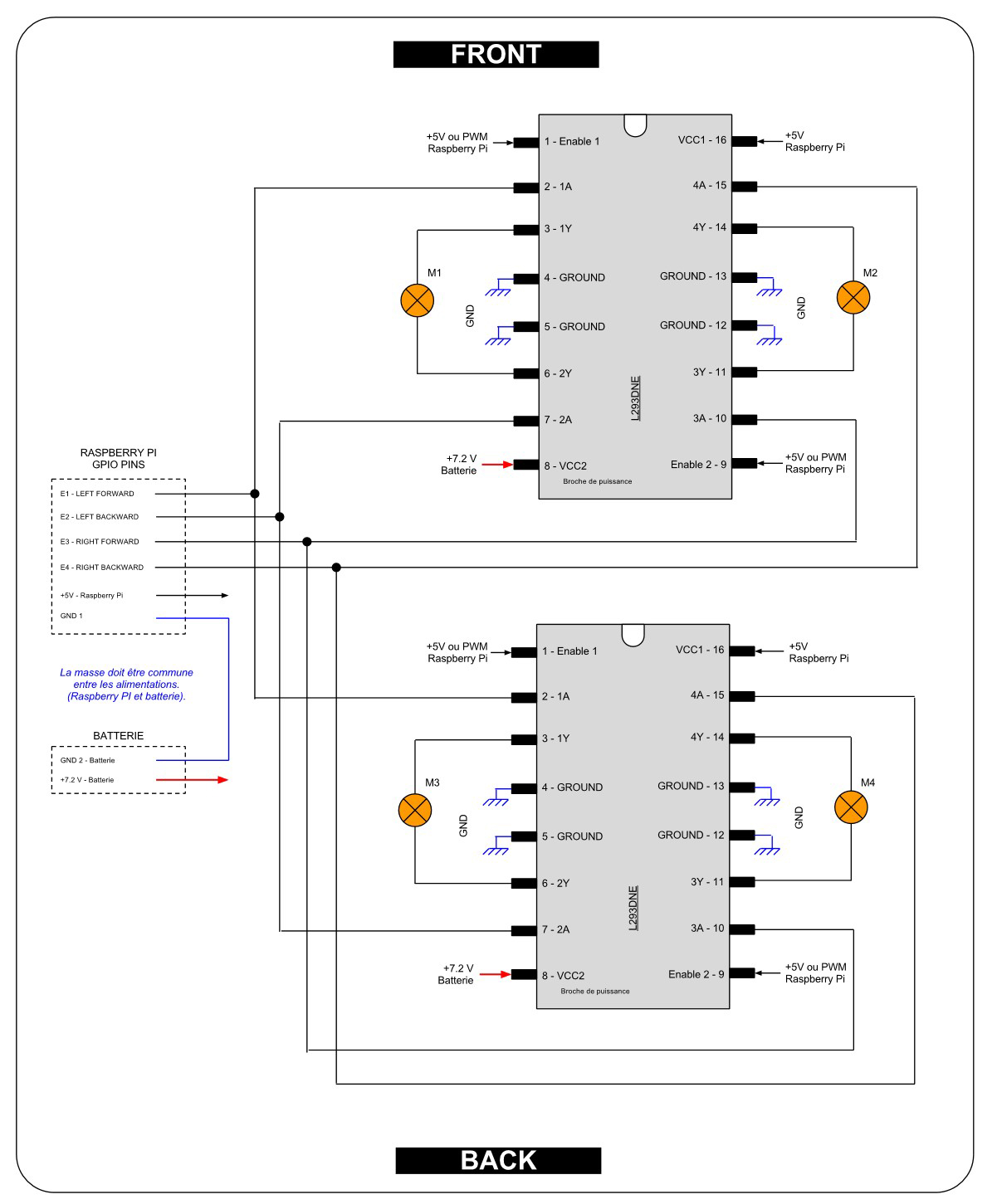
Dans notre cas, nous avons 4 moteurs (4 roues motrices), nous allons donc utiliser deux L293D.
N'ayant pas le matériel nécessaire pour réaliser des circuits imprimés, j'ai choisi de réaliser le montage sur une carte de prototypage.
Liste du matériel :
- 2 L293DNE (http://wak.li/1rm)
- 1 carte de prototypage (http://wak.li/1rn)
- 2 carte alimentation de prototypage (http://wak.li/1ro)
- 1 ensemble de fil (http://wak.li/1rp)
- 5 connecteur à vis pour la connectique des moteurs et alimentation (http://wak.li/1rr)
- 2 Support DIL 16 Broches (http://wak.li/1rq)
- 1 ensemble de fil connecteurs femelle - mâle (http://wak.li/1rs)
Et 4 moteurs (voir directement l'article sur la réalisation de la structure)
Le Schéma